What I built
A collection of exploratory machine learning and learning-based control experiments focused on problem formulation, data pipelines, and quantitative evaluation. Emphasis is on modeling discipline and metrics rather than production ML systems.
Approach
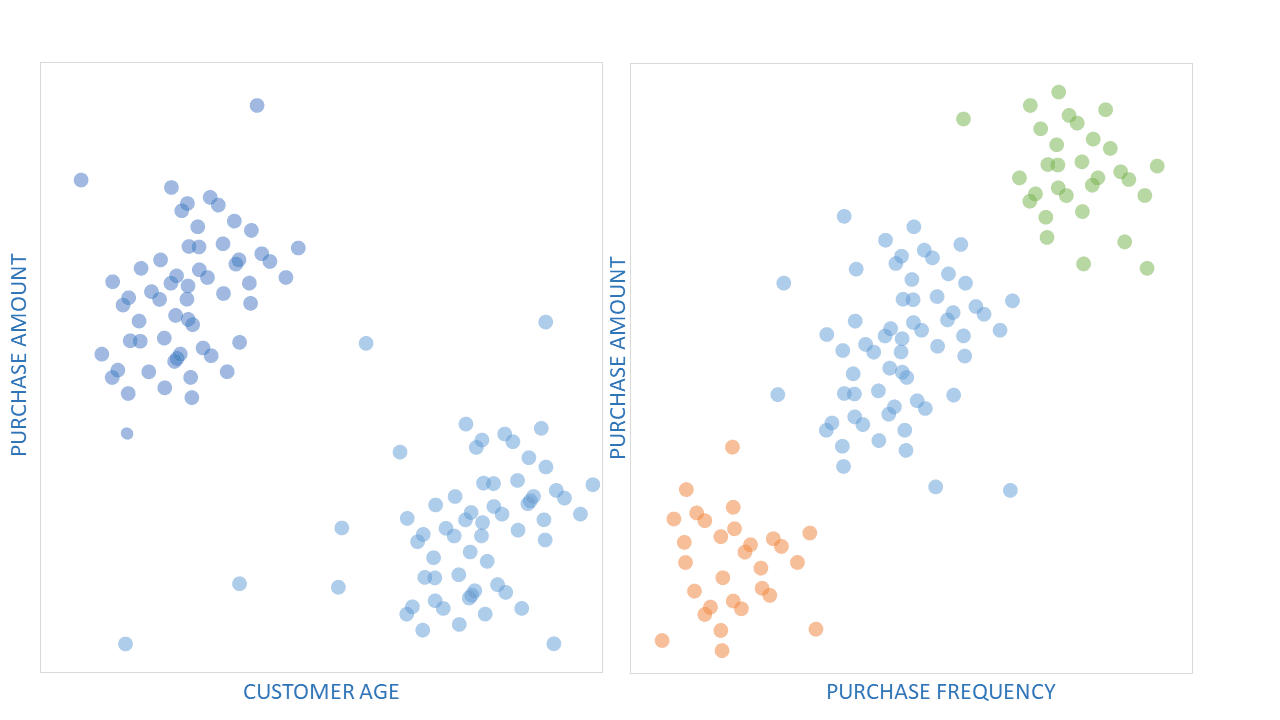
- Customer Segmentation — clustering-based analysis with feature normalization and metric-driven evaluation
- Sign Language Detection (LSTM) — sequence modeling for temporal gesture classification and performance evaluation
- CartPole — learning-based control benchmark; reward shaping, convergence behavior, and stability tradeoffs
- Time Pilot — reward-driven decision-making in a simulated environment
- Autonomous Driving (Gym) — simulated driving behaviors using learning-based policies