Robotics Software Engineer • New York, NY
Building real-time, safety-critical robotic systems
Robotics & mechatronics — real-time control, embedded systems, simulation-first workflows, and systems-level integration.
Robotics Software Intern / New Grad — real-time control, robotic systems, simulation, autonomy.
Projects
Tiered by impact. Click any card for the engineering story.


Suspension design, vehicle dynamics leadership, and test-driven tuning across BAJA ATV and kart platforms
.gif)
FK/IK + Jacobian-based velocity kinematics in MuJoCo, plus offline torque planning for a mid-air 'Fruit Ninja' intercept task
Vision-based human-in-the-loop control: MediaPipe gesture → reference mapping → encoder PD → tendon-driven actuation
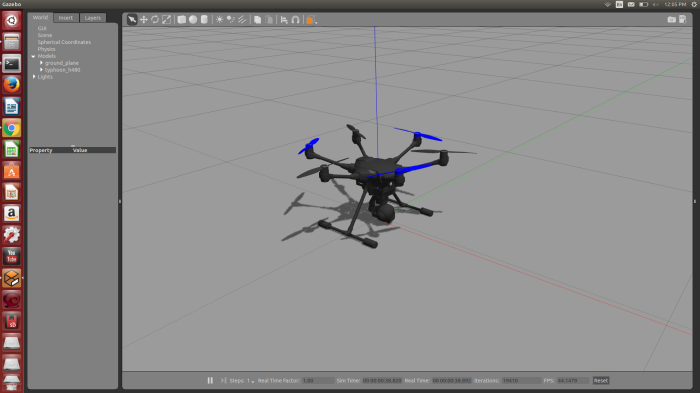
Vision-guided offboard control using ROS 2, PX4 SITL, and ArUco-based mission logic
ROS Noetic + Gazebo autonomy stack: RTAB-Map SLAM, AMCL localization, navigation, and simulated pickup/drop-off via markers
Tools & Tech Stack
Select a category to learn more.